機械手分為桁架機械手、數控桁機械手,組成一般由執行系統、驅動系統和控制系統組成。而致動和驅動系統主要設計完成手臂的正常功能,機械部分由氣動或電機驅動實現取物功能。隨著機械手應用的逐漸深入,要求插片放置、產品膠口切割、裝配簡單。改善工作條件,防止人身事故。在高溫、高壓、低溫、低壓、多塵、嘈雜、有異味、有放射性或其他有毒污染、工作空間狹小等條件下,直接用手操作有風險或不可能,機械手可以代替部分或全部人完成操作,從而改善工作條件。在一些簡單的、重復性的操作中,尤其是笨拙的操作,用機器人代替人可以防止因操作的疲憊或疏忽而造成的人身事故。可以減少人力,方便有節奏的生產。用機械手代替人做作業是直接減少人力的一面,減少人力的另一面是因為機械手可以連續工作。所以目前現役機床感應加工主動線上根本沒有機械手,以減少人力,更有效的控制生產節奏,方便有節奏的生產。提高生產過程中的主動性。機械手的使用有利于完成數據傳輸、工件裝卸、刀具更換和機器安裝等工作。,進而可以提高勞動生產率,降低生產成本。浙江勃展工業自動化設備有限公司為您提供 機械手設備,有想法可以來我司咨詢!溫州六軸機械手供應
機械手該如何做好日常保養工作?建議在桁架機械手使用后的一個月內每天清潔過濾設備。正常使用一個月后定期清潔設備。您可以根據氣源的質量設置時間表。氣管,數控桁架機械手連接接頭是否有泄漏,定期檢查旋轉接頭附近的氣管有無磨損、接頭、老化等情況。我們建議您在使用設備后的一個月內每天檢查設備的正常使用情況。使用一個月后,應每周檢查一次。承重連接為確保安全,所有承重連接螺栓和焊接部位應每周仔細檢查一次。如果松動或損壞,應立即重新擰緊或更換。溫州六軸機械手供應桁架式機械手相當于人的臂,但桁架機械手依靠機器工作。

桁架機械手的設計要點桁架機械手是自動化生產線的一個重要節點,不少自動化產線負責人找自動化上下料,自動碼垛設備,桁架機械手就是一個不錯的選擇,下面億思特和大家分享一下桁架機械手的設計要點:桁架機械手的結構應考慮各關節的限位開關和具有相應緩沖能力的機器限位塊,以及驅動裝置、傳動機構等部件的安裝。桁架機械手各關節軸盡量相互平行,相互垂直的軸盡量相交于一點,這樣可以簡化機械手運動學的正向和反向計算,便于機械手的控制。桁架機械手的臂相對于其共同的旋轉軸應盡量保持重量平衡,這對減輕電機負載和提高機械手臂運動的反應速度很有好處。在設計桁架機械手的手臂時,應盡可能利用安裝在機械手上的機電元器件的自重來減小機械手手臂的不平衡重量,并對剩余的不平衡重量設計平衡機構以達到平衡。平衡。必要時手臂的重量。
機械手壽命有哪些影響因素?機械手是由人力和手動操作進***動輔助的機械手。使用氣動助力機械手可以減少操作人員的工作量,在搬運大量工件時便于操作,便于準確定位,保證設備和操作人員的安全。氣動助力機械手操作簡單、使用安全、易于維護、靈活度高,適用于倉儲行業和零件加工現場的物料運輸、自動化生產線的裝配定位等應用。這里。氣動助力機械手雖然有比較完整的氣動回路,降低了工件抓取、提升、旋轉、技術等操作難度,減少了對設備的磨損和損壞,但是正確的操作人員數量是否會影響操作設備整體運行性能和設備壽命。以板式夾具為例,簡要介紹人為操作對設備和工件的影響。高效協作的機械手系統,優化生產流程,提升整體效能。
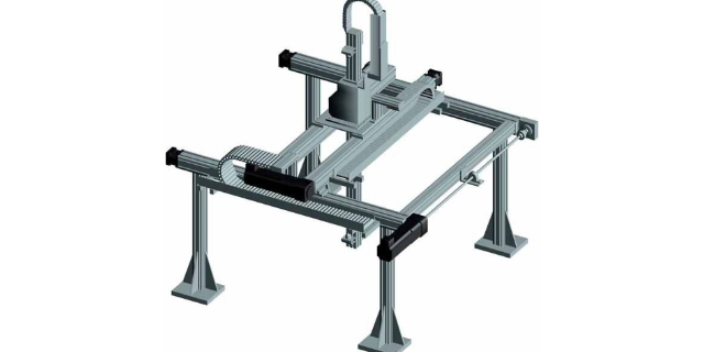
桁架機械手的設計要點?減少摩擦作為機械手的工作條件之一,桁架機械手也應盡可能減少機械間隙帶來的運動誤差。因此,在設計桁架機械手時,機械手各關節的承載距離應盡可能遠。它可以很小,每個關節都應該有一個可靠且易于調整的軸承間隙調節機構。桁架機械手的結構尺寸應滿足機械手工作空間的要求。工作空間的形狀和大小與機械臂的長度和臂關節的轉動范圍密切相關。但是,桁架機械臂末端的工作空間考慮了腕關節的空間姿態要求。如果對手腕姿勢提出具體要求,則手臂末端可達空間小于上述工作空間,未考慮手腕姿勢。浙江勃展工業自動化設備有限公司致力于提供 機械手設備,歡迎新老客戶致電!溫州非標機械手設備
浙江勃展工業自動化設備有限公司致力于提供機械手設備,期待您的光臨!溫州六軸機械手供應
桁架機械手焊接四大條件介紹。數控桁架機械手對整體尺寸精度沒有特別高的要求。配備偏差檢測和焊接過程電弧跟蹤功能可進行一定程度的修正2、應控制角焊縫裝配間隙。否則,焊縫很容易穿透。如果有縫隙,在機器人焊接前進行人工打底,可以有效減少焊透的發生。對接焊縫根部間隙應穩定均勻。現代焊接機器人通常具有間隙感應能力。在一定程度上可以根據焊縫的實際根部間隙進行參數修正,但如果間隙過于不均勻,變異性大,焊縫的熔合和焊縫成型質量也會很不穩定。應控制機械手焊縫余量。比如一個角焊縫應該是10,而實際板邊焊縫余量只有8,肯定會咬邊溫州六軸機械手供應





