吉林光伏運維機器人價格
國自機器人獲評首臺(套)項目一覽:2014,變電站KYN開關柜智能操控機器人 2015,基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人 2017,基于測量式激光導航的叉式搬運機器人物流系統 2020,SUNBOT子母式跨陣列作業光伏清潔機器人 碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔!能夠實時監測電池板的清潔狀態,并通過云平臺進行數據分析,為電站管理提供科學依據。吉林光伏運維機器人價格

原鋁的積累量不斷增加,廢料回收有著巨大的發展潛力。鋁合金的回收和再生是一項十分復雜的技術工作,由于各種鋁制品使用范圍寬廣而且分散,如何回收、集中、分類、實現再生加工是一項十分繁雜龐大的系統工程。全世界不同合金成分、不同性能的鋁合金數以百計,其中許多合金中的成分元素相互排斥,互不兼容,如何以**簡易的方法、比較低廉的成本和***的工藝使廢鋁的再生成分合乎理想合金要求,其性能滿足使用需要,質量能達到或接近原生材料的水平,是世界和國正在追求的目標。目前發達國家已形成了較為完善的廢雜鋁收集、熔煉、管理、分檢系統,適應不斷擴大的市場需求。西藏光伏智能清掃機器人價格光伏智能清掃機器人小巧靈活的設計,能夠適應不同規格和安裝環境的光伏面板。
做好光伏板清掃機器人發展前景預測,需把握預測的四個基本要素:1、信息。信息是客觀事物特性和變化的表征和反映,存在于各類載體,是光伏板清掃機器人預測的主要工作對象、工作基礎和成果反映。2、方法。方法是指在預測的過程中進行質和量的分析時所采用的各種手段。預測的方法按照不同的標準可以分成不同的類別。按照光伏板清掃機器人預測結果屬性可以分為定性預測和定量預測,按照預測時間長短的不同,可以分為長期預測、中期預測和短期預測。按照方法本身,更可以分成眾多的類別,**基本的是模型預測和非模型預測。
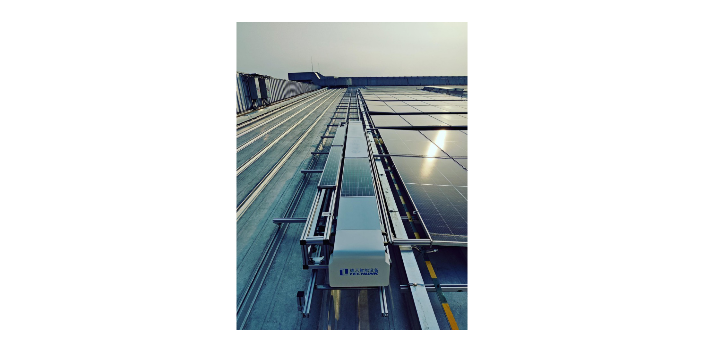
國自機器人獲評首臺(套)項目一覽:2014,變電站KYN開關柜智能操控機器人 2015,基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作業光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔!光伏組件的框架用作軌道,無需鋪設軌道,成本低,便于現場安裝和施工。

國自機器人獲評首臺(套)項目一覽,2014:變電站KYN開關柜智能操控機器人2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作業光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔!通過定期地對光伏電池板進行清掃,可顯著提高光伏發電量。光伏清掃機器人價格
衛生安全方面,機器人的運行不需要人工干預,避免了人工清潔過程中可能產生的傷害和污染風險。吉林光伏運維機器人價格
關于數據傳輸:光伏清掃機器人系統配2個數據傳輸模塊,用于機器人本體、擺渡車、服務器之間的傳輸,本體安裝物聯網卡用于云平臺及本地服務器的網絡通信。關于機器人數量:光伏清掃機器人應用在電站中,根據方陣的布局,設計停機架、橋接、擺渡車等輔助性結構,并確定機器人清掃范圍和機器人數量。關于控制系統:配套光伏清掃機器人管理系統,提供云端部署和管理使用權限;支持提供管理系統項目本地內網服務器部署;提供光伏清掃機器人管理系統軟件接口文件,可支持與其他平臺的數據對接。
吉林光伏運維機器人價格
- 吉林光伏運維機器人多少錢 2025-04-29
- 湖南智能清洗機器人多少錢 2025-04-29
- 青海光伏掃地機器人哪家好 2025-04-29
- 寧夏光伏清洗機器人哪家好 2025-04-29
- 山東光伏智能清掃機器人廠家價格 2025-04-29
- 安徽光伏清掃機器人報價表 2025-04-29
- 河北光伏清掃機器人廠家價格 2025-04-29
- 廣東運維機器人 2025-04-28
- 廣西光伏清洗機器人生產廠家 2025-04-28
- 河南光伏掃地機器人價格 2025-04-28
- 鎮江滲碳爐制造廠家 2025-04-29
- 浙江實木木材干燥設備廠家 2025-04-29
- 臺州浸滲報價 2025-04-29
- 福建落料設備軟管切管價格 2025-04-29
- 遼寧攪拌罐/發酵桶價格 2025-04-29
- 浙江電動純電折彎機廠家供應 2025-04-29
- 臺州小型高低溫一體機 2025-04-29
- 哈爾濱劍桿織機的作用 2025-04-29
- 固定耐磨防腐修復用戶體驗 2025-04-29
- 20萬大卡導熱油爐報價 2025-04-29