-
 大負載達明機器人控制
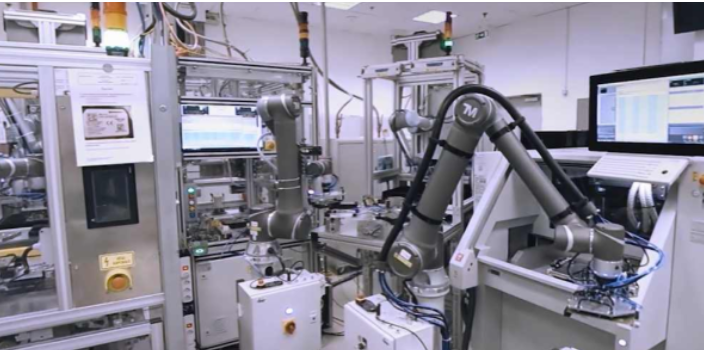
大負載達明機器人控制TMLandmark坐標系統,無論AMR與手臂位置如何移動,即可透過掃描實時更新手臂與環境點位的相對位置。TM20的超輕量設計搭配高負載能力,符合各產業自動化需求,如半導體后段制程以大量的人力進行上下料、十幾公斤以上的晶圓盒及物流的搬運等,因此適用于半導體、3...
2025-01-08 -
 江蘇自動貼標達明機器人廠家
江蘇自動貼標達明機器人廠家當AMR使用達明機器人導入制造業等應用時,內建智慧視覺的「眼睛」能彌補自動導引車的行走誤差,并精細定位進行快速的取放任務,提高生產稼動率,無須額外整合視覺,降低整合的時間與費用。視覺定位檢測可透過TMTMLandmark─跨手臂點位共享套件,快速復制點位,只需...
2025-01-07 -
 珠海AMR達明機器人廠家
珠海AMR達明機器人廠家Smart|智慧內建智能視覺系統:TM機器人將視覺系統與軟硬件設備進行了整合,是全球款內建視覺的協作機器人,您再也無需像過去一樣面對復雜的視覺組件。內建視覺包含樣板比對、對象定位、影像增強、條碼辨別、色彩分類等功能,通過簡單設定即可輕松完成機器人任務編輯。高彈...
2025-01-05 -
 珠海咖啡達明機器人制作
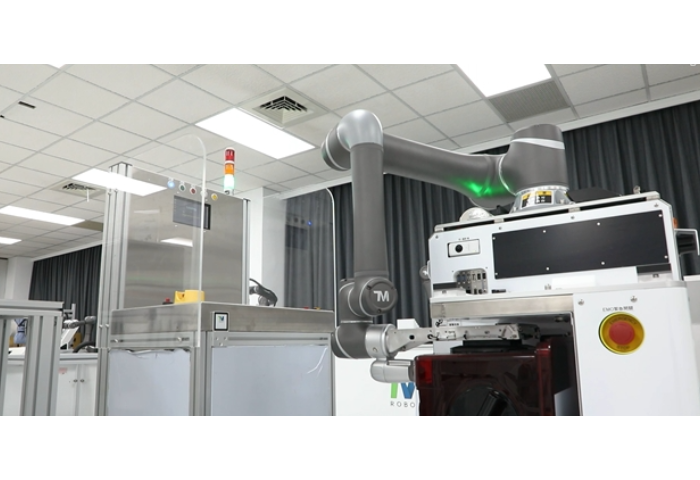
珠海咖啡達明機器人制作作為海內外協作型機器人和智能視覺系統先驅,達明機器人針對AGV/AMR搭配的復合機器人應用場景推出直流電源版本的手臂(M系列),透過TM特有的Landmark及TMvision視覺系統建立動態相對坐標體系并實現跨手臂點位共享,彌補AMR行走的運動偏差并精細定位...
2025-01-04 -
 珠海汽車門拋光達明機器人模型
珠海汽車門拋光達明機器人模型作為海內外協作型機器人和智能視覺系統先驅,達明機器人針對AGV/AMR搭配的復合機器人應用場景推出直流電源版本的手臂(M系列),透過TM特有的Landmark及TMvision視覺系統建立動態相對坐標體系并實現跨手臂點位共享,彌補AMR行走的運動偏差并精細定位...
2025-01-02 -
 四川晶圓盒搬運復合機器人配件
四川晶圓盒搬運復合機器人配件達明機器人針對AGV/AMR搭配的復合機器人應用場景,推出直流電源版本的手臂(M系列),透過TM特有的Landmark及TMvision視覺系統建立動態相對坐標體系并實現跨手臂點位共享,彌補AMR行走的運動偏差并定位、平穩取放,非常適用于醫療及半導體行業移動搬...
2025-01-01 -
 遼寧移動搬運復合機器人聯系電話
遼寧移動搬運復合機器人聯系電話協作機器人可以簡化物料搬運、分揀、上下料和裝箱操作,將工人從單一枯燥且繁重的工作中解放出來。再通過達明機器人集成創夾具及視覺,即使在非結構化環境中,達明機器人也能識別、拾取各種物體,部署于復雜度更的自動化生產流程中。且達明機器人易于編程,用戶更可以通過其示教器...
2024-12-30 -
 長春AMR復合機器人廠家
長春AMR復合機器人廠家更簡易的部署:自動構建地圖,無需場景改造。具備多種應用模塊與通用標準接口,直接對接企業 MES / WMS 信息系統,無需定制開發;更智能的控制:一代移動機器人分布式控制系統,機器人單機作業與多機調度切換自如;更平穩的移動:采用6輪懸掛系統,過縫過坎平穩順滑,...
2024-12-29 -
廣東上下料復合機器人圖片
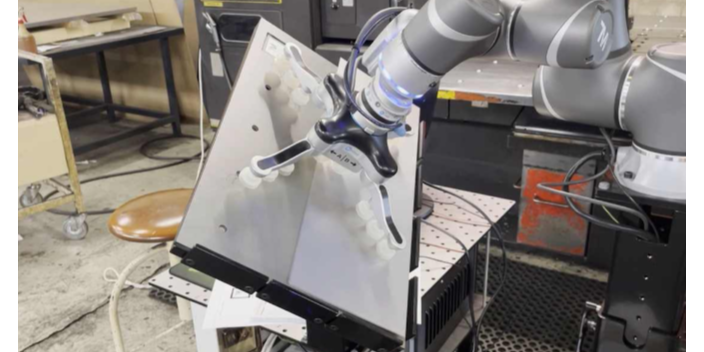
導入達明自帶視覺協作機器手臂-TM12M及TM landmark ,復合機器人也可輕松應用在精精度作業站別, 并且也可以十分輕松地完成調試及復制空間定位精度±0.5mm ( AGV 定位精度±5mm ; 通過TMvision + TM Landmark,將空間...
2024-12-27 -
 四川晶圓盒搬運復合機器人編程
四川晶圓盒搬運復合機器人編程導入達明自帶視覺協作機器手臂-TM12M及TM landmark ,復合機器人也可輕松應用在精精度作業站別, 并且也可以十分輕松地完成調試及復制空間定位精度±0.5mm ( AGV 定位精度±5mm ; 通過TMvision + TM Landmark,將空間...
2024-12-26 -
 北京智能工廠復合機器人工作原理
北京智能工廠復合機器人工作原理導入達明自帶視覺協作機器手臂-TM12M及TM landmark ,復合機器人也可輕松應用在精精度作業站別, 并且也可以十分輕松地完成調試及復制空間定位精度±0.5mm ( AGV 定位精度±5mm ; 通過TMvision + TM Landmark,將空間...
2024-12-24 -
遼寧晶圓盒搬運復合機器人價格
隨著工廠內部制造復雜程度的日益上升,對于自動化設備柔性化的需求也更加迫切,柔性復合機器人的出現具有能夠在復雜環境下驚醒靈活工作的特點,同時,柔性復合機器人也能夠在不斷變形之中完成各項任務、計劃等,對于人機協同工作的開展以及發展來說,能夠起到提升安全性的關鍵作用...
2024-12-23 -
 北京AMR復合機器人廠家
北京AMR復合機器人廠家當一家公司入局工業移動機器人領域,沒選擇紅海市場、而是去啃硬骨頭——半導體晶圓搬運時,我們不免感到好奇。不同于搬運3C電子,晶圓的脆弱、昂貴和極度潔凈決定了它對于移動機器人的嚴苛要求。工廠車間對潔凈度等級CLASS1的要求、細微的震動也會導致整箱報廢……毫末般...
2024-12-22 -
 福建靈活識別復合機器人價格
福建靈活識別復合機器人價格復合型機器人(Hybrid Robot)是一種結合了多種機器人技術的綜合性機器人系統,包括機械臂、移動平臺、傳感器、視覺系統、人工智能、控制系統等,具有復雜的動作控制和度智能的特點,可以適應多種復雜環境,并完成多種任務。復合型機器人的應用范圍非常,包括制造業、...
2024-12-22 -
四川晶圓盒搬運復合機器人加工
復合型機器人的組成部分包括: 機械臂:復合型機器人通常擁有一個或多個機械臂,可以完成的機械加工、裝配和拆卸等工作。機械臂可以是任意數量的關節連接起來的,具有度的自由度和靈活性,可根據任務需要進行調整。 移動平臺:移動平臺通常是機器人的底盤,它可以讓機器人在不同...
2024-12-21 -
 四川大負載復合機器人加工
四川大負載復合機器人加工在人機協作模式下,人類與協作機器人相互攜手合作并且截長補短,可望帶動生產效率與彈性的提升。而有不少廠商也開始思考如何讓人類與機器人透過更好的協作方式讓彼此發揮更大的價值,從跳脫傳統防護柵欄、區域隔離到如今近距離互動,不難發現人機共工越來越貼合密切,市場認為,在...
2024-12-21 -
四川大負載復合機器人聯系電話
更簡易的部署:自動構建地圖,無需場景改造。具備多種應用模塊與通用標準接口,直接對接企業 MES / WMS 信息系統,無需定制開發;更智能的控制:一代移動機器人分布式控制系統,機器人單機作業與多機調度切換自如;更平穩的移動:采用6輪懸掛系統,過縫過坎平穩順滑,...
2024-12-20 -
 上海組裝復合機器人工作原理
上海組裝復合機器人工作原理同時針對AGV/AMR搭配的復合機器人應用場景推出直流電源版本的手臂(M系列),透過TM特有的Landmark及TMvision視覺系統建立動態相對坐標體系并實現跨手臂點位共享,彌補AMR行走的運動偏差并定位、平穩取放,非常適用于醫療及半導體等行業移動搬運、智...
2024-12-20 -
 山東3C電子行業AI協作機器人模型
山東3C電子行業AI協作機器人模型達明機器人AICOBOT是內建視覺系統與擁有AI技術的協作型機器人,將協作機器人結合AI原生引擎及智能視覺,打造下個時代的協作機器人。提供AI與智能視覺整合為一的軟硬件解決方案,有助于建立和睦的工作環境,以創新的協作模式改善生產環境,讓人機相互協作并發揮彼此長...
2024-12-19 -
安徽涂膠AI協作機器人推薦
協作機器人,其實是一種能與人類在共同空間工作、近距離互動的機器人。簡言之,就是能和人類一起「干活」。主要由機器人本體、中空力矩電機、諧波減速機、伺服驅動器、控制器組成。按照結構形式、載荷大小、力感知方式以及機器人軸數的不同,協作機器人可以分為十多種。不同載荷的...
2024-12-19 -
 深圳智能AI協作機器人尺寸
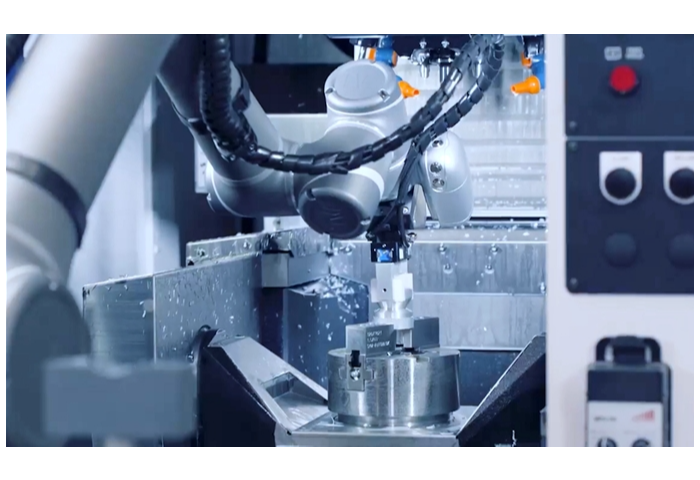
深圳智能AI協作機器人尺寸協作機器人移動上下料平臺方案,采用移動上下料的方式,代替人工作業。輕量化設計,機器人自重負載比低,移動方便。機器人采用100~240V交流供電,或者22~60V直流供電,功耗300W,供電非常方便。達明特有的Landmark標簽貼付在CNC設備上。手臂末端相機...
2024-12-18 -
 深圳涂膠AI協作機器人模型
深圳涂膠AI協作機器人模型協作機器人從適應生產關系和生產方式出發,注定可以解決從21世紀初開始出現的生產中的難題。協作機器人可以靈活的和人配合,迅速投入生產,部署在如上下料,螺絲擰緊,拋光打磨等應用場合。過去需要長達多天甚至數周才能完成的應用,如今可以縮短到一兩天甚至數小時內完成。縱然...
2024-12-18 -
 安徽組裝達明機器人制作
安徽組裝達明機器人制作陶瓷基板涂膠。達明機器人可輕松完成周邊涂膠機整合,并搭配其內建的視覺系統,無需定位治具便可實現散熱模組半成品的取放料、壓合、整料等動作,輕松無負擔。PCBA揭蓋及DRAM組裝。透過內建智慧視覺進行精細定位,達明協作機械手臂輕松實現的過錫爐后段保護蓋的分類取放及...
2024-12-17 -
 遼寧汽車門拋光AI協作機器人分類
遼寧汽車門拋光AI協作機器人分類協作機器人(collaborativerobot,簡稱cobot或co-robot),是為與人直接交互而設計的機器人,即一種被設計成能與人類在共同工作空間中進行近距離互動的機器人。傳統工業機器人是在安全圍欄或其他保護措施之下,完成諸如焊接、噴涂、搬運碼垛、拋光...
2024-12-17 -
大負載達明機器人定制
當AMR使用達明機器人導入制造業等應用時,內建智慧視覺的「眼睛」能彌補自動導引車的行走誤差,并精細定位進行快速的取放任務,提高生產稼動率,無須額外整合視覺,降低整合的時間與費用。視覺定位檢測可透過TMTMLandmark─跨手臂點位共享套件,快速復制點位,只需...
2024-12-16 -
 遼寧焊接達明機器人
遼寧焊接達明機器人3C行業中,產品零部件的分類、貼標簽、螺絲鎖附、包裝等工藝較為常見,采用達明機器人代替人工可實現精細視覺定位并完成一系列工藝要求,助力企業更快提升智能制造能力和品質。開關模組分類達明機器人配合TMPlug&Play電爪實現不同開關模組的擺放,使得運用更多元化。...
2024-12-16 -
 浙江電子組裝達明機器人聯系電話
浙江電子組裝達明機器人聯系電話TM智慧型協作機器人擁有協作型機器人的操作簡單、快速部署、靈活運用的特點外,還創新的將視覺辨識結合在機器人上,讓機器人有了眼睛。在使用視覺功能時更簡易直覺,內建的視覺辨識免除了以往更換機器人時的重復校正,可以實現快速復制部署的任務。內建視覺將TM機器人的功能從...
2024-12-15 -
山東餐飲零售達明機器人工作原理
作為海內外協作型機器人和智能視覺系統先驅,達明機器人針對AGV/AMR搭配的復合機器人應用場景推出直流電源版本的手臂(M系列),透過TM特有的Landmark及TMvision視覺系統建立動態相對坐標體系并實現跨手臂點位共享,彌補AMR行走的運動偏差并精細定位...
2024-12-15 -
 廣東上下料達明機器人工作原理
廣東上下料達明機器人工作原理陶瓷基板涂膠。達明機器人可輕松完成周邊涂膠機整合,并搭配其內建的視覺系統,無需定位治具便可實現散熱模組半成品的取放料、壓合、整料等動作,輕松無負擔。PCBA揭蓋及DRAM組裝。透過內建智慧視覺進行精細定位,達明協作機械手臂輕松實現的過錫爐后段保護蓋的分類取放及...
2024-12-14 -
 北京焊接達明機器人設計
北京焊接達明機器人設計在3C行業中,螺絲鎖附是非常重要的裝配工藝,而傳統的四軸工業機器人或者設備滿足單一平面所在的孔位進行鎖附,面對同產線不同產品、多平面作業時卻顯得有心無力,而TMROBOT的六軸設計使得其姿態靈活多變,手拉式的示教方式可以便捷地到達需要調試的位置,“眼在手”的視...
2024-12-14