中國臺灣卡車主動安全預警系統(tǒng)聯(lián)系方式
帶云臺的主動安全一體機在挖掘機安全管理中的應用方案,解決了關(guān)鍵的安全問題,提高了施工的安全性和效率。以下是具體解決的安全管理問題:
一、實時監(jiān)控與預警全方WEI監(jiān)控:通過云臺上的高清攝像頭,實現(xiàn)挖掘機作業(yè)環(huán)境的360度無死角監(jiān)控,確保駕駛員對周圍環(huán)境的全MIAN了解。障礙物預警:實時檢測挖掘機周圍的障礙物,包括人員、車輛、其他機械等,一旦檢測到潛在碰撞風險,立即發(fā)出聲光警報。特別針對挖掘機存在的視覺盲區(qū),如鏟斗下方、側(cè)面等,通過廣角攝像頭和先進的圖像處理技術(shù),提供清晰的盲區(qū)視圖,減少因盲區(qū)導致的安全事故。
二、遠程監(jiān)控與管理實時數(shù)據(jù)傳輸:將挖掘機的實時視頻、工作參數(shù)等數(shù)據(jù)通過云平臺傳輸?shù)竭h程監(jiān)控中心,可以隨時隨地查看挖掘機的作業(yè)情況,遠程調(diào)度和指揮,確保挖掘機的合理布局和高效作業(yè)。實時監(jiān)測挖掘機的運行狀態(tài),預測并預警潛在故障,提前安排維護計劃,減少因故障導致的停機時間。
三、數(shù)據(jù)分析與決策支持作業(yè)數(shù)據(jù)分析:收集和分析挖掘機的作業(yè)數(shù)據(jù),如工作時間、工作負載、能耗等,評估挖掘機的使用效率和性能狀況。基于數(shù)據(jù)分析結(jié)果,優(yōu)化施工計劃,合理安排挖掘機的作業(yè)時間和作業(yè)區(qū)域,提高施工效率。
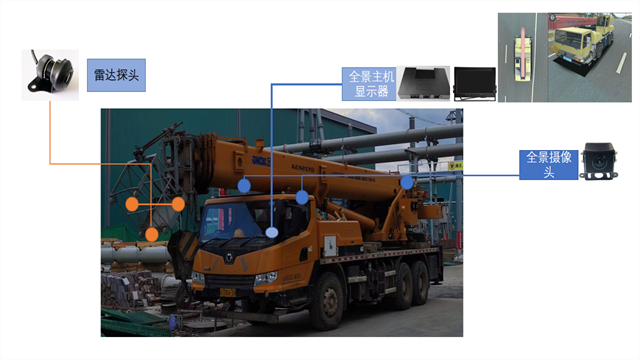
毫米波雷達具有很高的探測精確度,分辨率和穿透力,在復雜環(huán)境精確探測出車輛周圍的人員設備和其他障礙物.中國臺灣卡車主動安全預警系統(tǒng)聯(lián)系方式
主動安全預警系統(tǒng)
(上篇)4G 360全景影像集成ADAS防碰撞預警及疲勞駕駛預警的應用效果非常顯ZHU,主要體現(xiàn)在以下幾個方面:
一、提升駕駛安全性全方W視野監(jiān)控:
4G 360全景影像系統(tǒng)通過安裝在車輛四周的多個高清攝像頭,實時捕捉并拼接車輛周圍的全景圖像,為駕駛員提供無盲區(qū)的視野。這種全景監(jiān)控能力極大地提高了駕駛員在行車和泊車過程中的安全性,使駕駛員能夠及時發(fā)現(xiàn)并避免潛在的危險,如行人、其他車輛或障礙物等。集成的ADAS系統(tǒng)能夠?qū)崟r監(jiān)測車輛前方的交通狀況,包括車輛、行人、障礙物等。通過計算車輛與前方物體的距離、速度差等參數(shù),ADAS系統(tǒng)能夠評估碰撞的可能性,并在必要時向駕駛員發(fā)出預警。這種預警功能有助于駕駛員提前采取措施,避免碰撞事故的發(fā)生。
二、增強駕駛輔助能力智能泊車輔助:
在泊車過程中,4G 360全景影像系統(tǒng)能夠自動識別車位,并提供倒車入庫、側(cè)方停車等操作的指導。結(jié)合ADAS系統(tǒng)的輔助,駕駛員可以更加輕松、安全地完成泊車操作。疲勞駕駛預警系統(tǒng)通過實時監(jiān)測駕駛員的面部特征、眼部信號、頭部運動性等,判斷駕駛員是否存在疲勞駕駛的情況。一旦檢測到疲勞駕駛,系統(tǒng)會及時發(fā)出警報,提醒駕駛員注意休息,從而有效預防因疲勞駕駛導致的交通事故。 中國臺灣卡車主動安全預警系統(tǒng)聯(lián)系方式主動安全預警系統(tǒng)通過4-6路環(huán)視拼接和BSD盲區(qū)預警功能,主動安全4G智能一體機能360度監(jiān)控車輛周圍的環(huán)境.
擺臂車安裝4G 360全景影像集成雷達系統(tǒng)的具體應用主要體現(xiàn)在以下幾個方面:
一、系統(tǒng)組成與功能360全景影像系統(tǒng):該系統(tǒng)通過安裝在擺臂車車身周圍前后左右的四個超廣角高清夜視攝像頭,實時采集車身四周的高清視頻畫面。經(jīng)過畸變矯正、透SHI變換、圖像拼接和融合等軟件算法處理,合成車身周圍360°的鳥瞰全景畫面,實現(xiàn)無縫拼接,為駕駛員提供360°全景駕駛輔助。集成雷達系統(tǒng)包括超聲波雷達或毫米波雷達等。
二、具體應用場景消除視覺盲區(qū):擺臂車由于車身結(jié)構(gòu)特殊,存在較多的視覺盲區(qū)。360全景影像系統(tǒng)可以消除這些盲區(qū),避免事故發(fā)生。集成雷達系統(tǒng)能夠?qū)崟r監(jiān)測車輛周圍的障礙物,并與360全景影像系統(tǒng)配合,提供聲音、圖像等多種形式的預警及時采取措施避免碰撞。通過4G網(wǎng)絡與后臺遠程管理系統(tǒng)相連,擺臂車的運行狀態(tài)、作業(yè)情況等可以實時上傳到后臺進行監(jiān)控和管理。
三、技術(shù)優(yōu)勢與特點高清夜視能力:系統(tǒng)配備的高清夜視攝像頭能夠在夜間或低光照環(huán)境下提供清晰的視頻畫面,確保全天候的監(jiān)控效果。系統(tǒng)內(nèi)置先進的圖像處理算法和機器學習算法,能夠自動識別并標注出車輛周圍的障礙物、行人等目標物體,為駕駛員提供更加智能的駕駛輔助。
帶云臺監(jiān)控管理主動安全一體機在實際應用中解決了多個實際問題,主要體現(xiàn)在以下幾個方面:
一、提升駕駛安全性盲區(qū)預警:360°全景影像系統(tǒng)和BSD盲區(qū)預警功能,結(jié)合AI技術(shù)對車輛周圍進行實時檢測,識別并跟蹤潛在的危險物體,如行人、其他車輛等。在預測到潛在危險時,系統(tǒng)進行聲光電告警,有效避免盲區(qū)碰撞事故。外置語音告警裝置和車內(nèi)顯示屏的同步放大功能,實時提醒駕駛員注意盲區(qū)物體。
二、增強行車監(jiān)控與記錄行車視頻記錄:支持SD卡對車輛行駛過程進行實時本地記錄,為交通事故的責任認定提供有力證據(jù),同時也有助于車隊管理和車輛安全監(jiān)控。
三、提高車輛運營效率智能限速:一體機具備限速開關(guān)信號輸出功能,能夠?qū)崟r監(jiān)測行人等障礙物,并在必要時觸發(fā)語音告警和限速功能,有助于維護交通秩序和提高車輛運營效率。通過云平臺接入功能,可以實現(xiàn)車輛的遠程監(jiān)控和管理,包括實時查看車輛位置、行駛軌跡、監(jiān)控畫面等,為車隊管理提供便利。
四、適應多種安裝環(huán)境云臺靈活性:云臺設計使得攝像頭可以水平和垂直運動,適應不同的監(jiān)控需求。同時,云臺還具備防護罩等保護措施,確保攝像頭在惡劣環(huán)境下也能正常工作。支持側(cè)裝和吊裝等多種安裝方式,滿足不同場景下的安裝需求。
主動安全預警系統(tǒng)通常配備多種傳感器,如攝像頭,雷達,激光雷達等,這些傳感器提供的數(shù)據(jù)需要進行融合和處理.

(下篇)叉車AI防撞預警系統(tǒng)為叉車設計的一款智能設備,支持IP67防水,集車載視頻監(jiān)控、行車記錄儀、DSM駕駛員狀態(tài)分析系統(tǒng)、BSD盲區(qū)監(jiān)控于一體。內(nèi)置AI高性能處理芯片,采用H.265視頻編解碼技術(shù),能夠?qū)崿F(xiàn)駕駛員人臉識別、控車、安全檢測等功能。結(jié)合3G/4G無線傳輸技術(shù)、定位技術(shù),可以實現(xiàn)視頻錄像、汽車行駛記錄信息的實時上傳、駕駛行為分析及報警證據(jù)上傳。通過控制中心可以實時對車輛進行遠程監(jiān)控、遠程分析和處理。作為專為叉車設計的智能安全設備,其集成了多項先進技術(shù),為工業(yè)車輛的運行安全提供了全方WEI的保障。以下是對該系統(tǒng)特點的詳細闡述:
2,H.265視頻編解碼技術(shù):采用先進的視頻編解碼技術(shù),提高視頻傳輸?shù)男屎颓逦龋档途W(wǎng)絡帶寬占用,確保視頻信息的實時傳輸和存儲。
四,實時數(shù)據(jù)傳輸與分析
1,3G/4G無線傳輸技術(shù):支持無線數(shù)據(jù)傳輸,實現(xiàn)視頻錄像、汽車行駛記錄信息的實時上傳,方便控制中心對叉車進行遠程監(jiān)控和管理。
2,定位技術(shù):結(jié)合GPS或其他定位技術(shù),實時獲取叉車的地理位置信息,為遠程監(jiān)控和分析提供準確的數(shù)據(jù)支持。
網(wǎng)口輸出能夠提供穩(wěn)定且高速的數(shù)據(jù)傳輸通道,確保8路高清視頻信號能夠?qū)崟r,流暢地傳輸?shù)街付ǖ慕邮斩?廣西卡車主動安全預警系統(tǒng)廠家供應
主動安全預警車載云臺監(jiān)控系統(tǒng)利用GPS定位功能可以精細確定車輛的位置.中國臺灣卡車主動安全預警系統(tǒng)聯(lián)系方式
(專輯二)主動安全預警系統(tǒng)的技術(shù)集成是汽車安全技術(shù)的重要組成部分,通過集成多種先進技術(shù)來提供更高的駕駛安全性。以下是主動安全預警系統(tǒng)技術(shù)集成的簡要分析:
二、輔助技術(shù)集成聲音和震動警告:主動安全預警系統(tǒng)可以通過聲音、震動或座椅反饋向駕駛員發(fā)出警告。低功耗技術(shù):主要應用于系統(tǒng)的某些模塊(如胎壓檢測模塊),通過減少元器件數(shù)量、降低功耗、減少數(shù)據(jù)發(fā)送次數(shù)等方式,延長系統(tǒng)壽命。Zigbee無線通信技術(shù):作為物聯(lián)網(wǎng)關(guān)鍵技術(shù)之一,主要用于實現(xiàn)車車之間的通信,共享行駛狀態(tài)信息,為計算安全距離和防追尾碰撞預警提供數(shù)據(jù)支持。
三、系統(tǒng)功能與實現(xiàn)防追尾報警:包括預警安全距離報警和ZUI小安全距離報警兩種級別,分別在不同階段提醒駕駛員注意前車距離,避免追尾事故。自適應巡航控制(ACC):利用雷達或激光等傳感器監(jiān)測前方車輛的距離和速度,并自動調(diào)整車輛速度以與前車保持安全距離。前碰撞警示與緊急制動輔助(FCW/EB):通過車頭的雷達和攝像頭監(jiān)測前方車輛和障礙物,當檢測到潛在碰撞風險時,系統(tǒng)發(fā)出警示并協(xié)助駕駛員進行緊急制動。車道偏離預警系統(tǒng)(LDW):使用攝像頭或其他傳感器監(jiān)測車輛是否偏離道路,并提供聲音或震動警示以確保駕駛員注意力集中。 中國臺灣卡車主動安全預警系統(tǒng)聯(lián)系方式
- 中國香港礦卡多路視頻拼接系統(tǒng)方案商 2025-04-27
- 福建云臺多路視頻拼接系統(tǒng)定制開發(fā) 2025-04-27
- 掛車360全景環(huán)視系統(tǒng)廠家直銷 2025-04-27
- 叉車360全景環(huán)視系統(tǒng)廠家直銷 2025-04-27
- 深圳6路360全景系統(tǒng)安裝 2025-04-27
- 中國香港司機行為檢測預警系統(tǒng)進度計劃 2025-04-27
- 泥頭車360全景影像系統(tǒng)生產(chǎn)廠家 2025-04-27
- 安徽物聯(lián)網(wǎng)司機行為檢測預警系統(tǒng) 2025-04-27
- 商用車8路360全景影像系統(tǒng)價格 2025-04-27
- 廣東360全景影像設備采購 2025-04-26
- 本地汽車LIN 2025-04-27
- 汽車車漆護理哪家好 2025-04-27
- 浙江原裝汽車配件咨詢 2025-04-27
- 熱水器小型增壓泵 2025-04-27
- 柴油抽水泵的價格 2025-04-27
- 福建ADAS駕駛輔助設備介紹 2025-04-27
- 蘇州專業(yè)逆向工程價格行情 2025-04-27
- 六安防水雙面膠代理 2025-04-27
- 鶴崗增壓泵價格 2025-04-27
- 普陀區(qū)實在汽車零配件管理 2025-04-27